Week 2
I create basic models for the leg bar and the hero in Blender. The hero model is the bare minimum for figuring out the specifics of puppet movement.
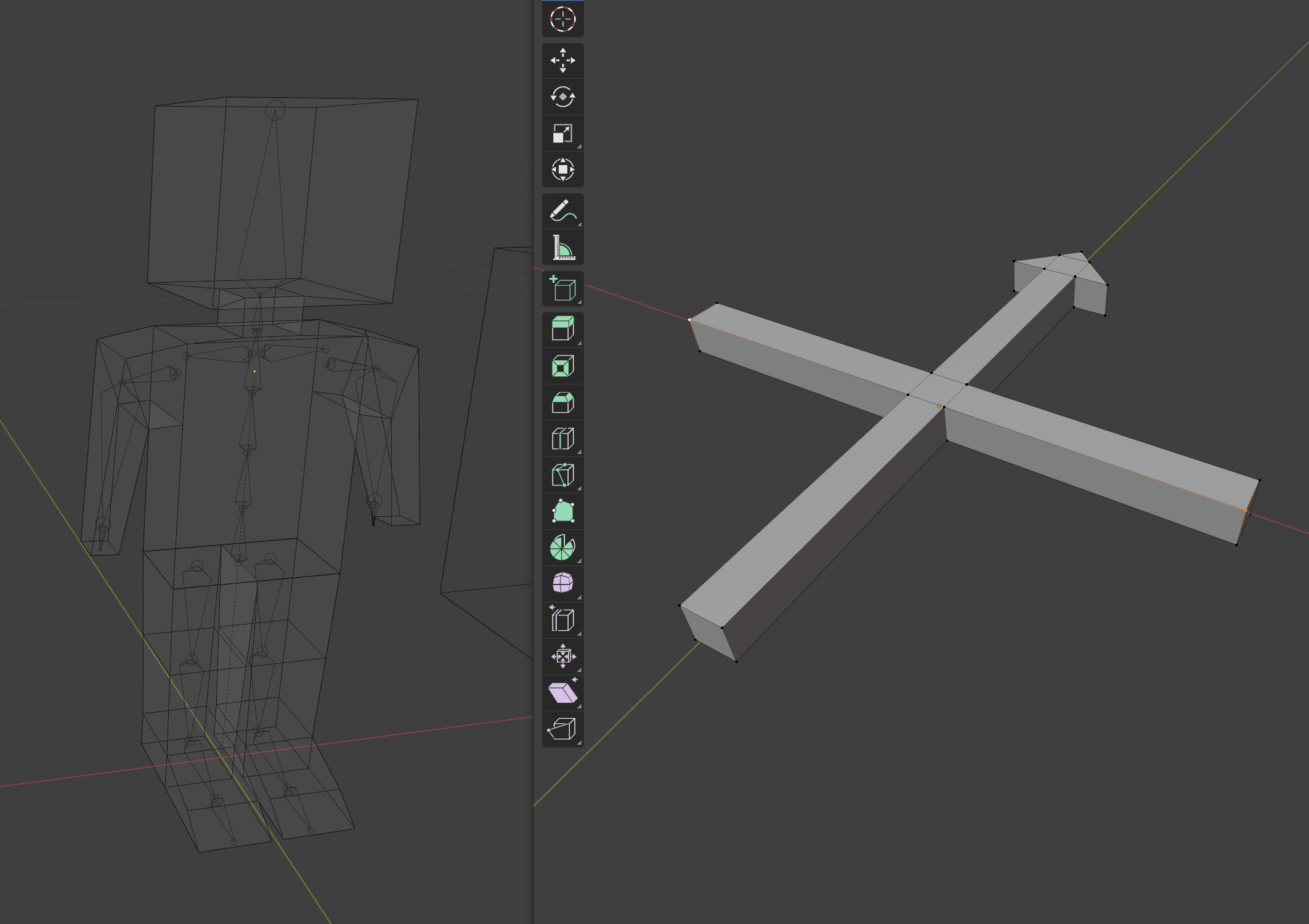
While the model showcases my complete lack of modeling and rigging skills, it has a rig, which I can use for figuring out inverse kinematics in Godot and validating my locomotion idea.
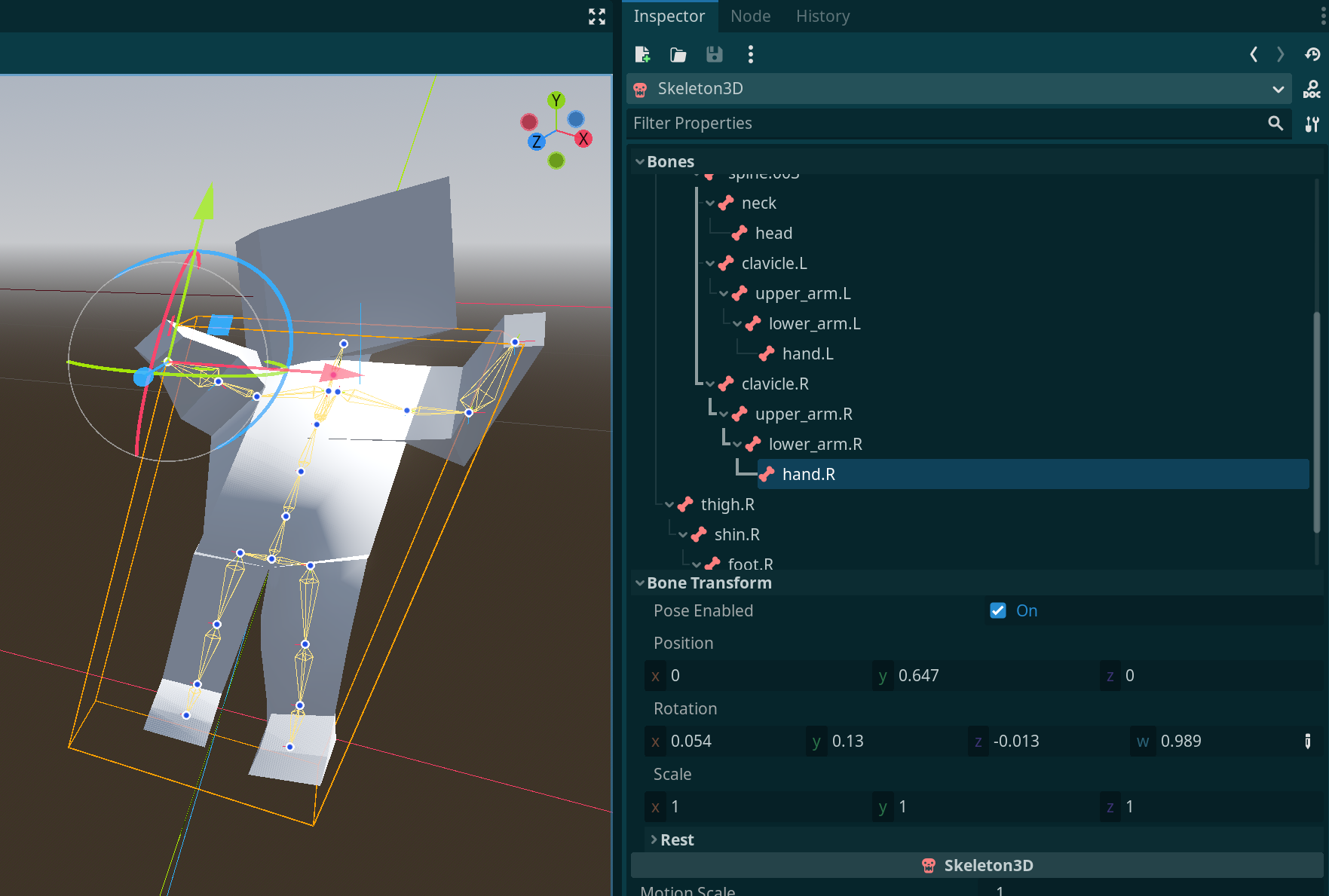
In Godot I can pose the model like I'd expect to.
Further, I think about how to modularize my code. I decide to split the logic for the leg bar and the hero movement. The leg bar I name control bar in case it receives additional responsibilities in the future. The hero movement code I extract to a puppet script in case I want to control other puppets in addition to the hero in the future.
At this point control bar is its own scene and script. Hero on the other hand is a scene to which the puppet script is attached. There is no puppet scene. Using scene inheritance instead of attaching the puppet script to the hero scene might become beneficial when there are more puppets than the hero.
Spoilers from future me: I don't have enough time to learn modeling. This model will remain the hero model. This makes inverse kinematics pretty pointless, because the model does not have enough geometry to bend appropriately.